注意
跳转到末尾 下载完整的示例代码。
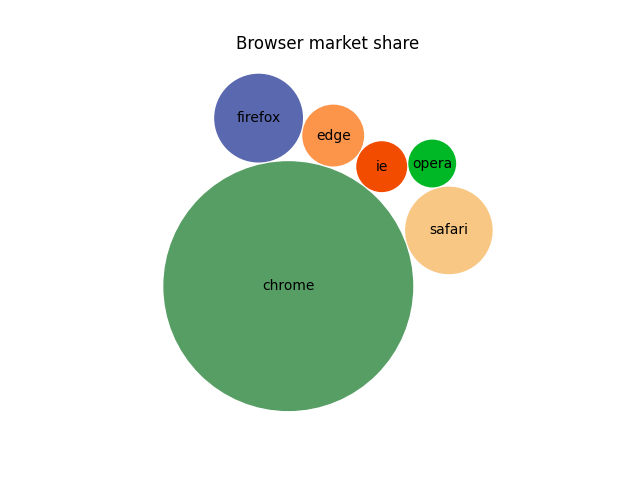
簇状气泡图#
创建簇状气泡图以表示标量数据。所提出的算法试图将所有气泡尽可能地移近质心,同时通过移动碰撞对象来避免一些碰撞。在此示例中,我们绘制了不同桌面浏览器的市场份额。(来源: https://gs.statcounter.com/browser-market-share/desktop/worldwidev)
import matplotlib.pyplot as plt
import numpy as np
browser_market_share = {
'browsers': ['firefox', 'chrome', 'safari', 'edge', 'ie', 'opera'],
'market_share': [8.61, 69.55, 8.36, 4.12, 2.76, 2.43],
'color': ['#5A69AF', '#579E65', '#F9C784', '#FC944A', '#F24C00', '#00B825']
}
class BubbleChart:
def __init__(self, area, bubble_spacing=0):
"""
Setup for bubble collapse.
Parameters
----------
area : array-like
Area of the bubbles.
bubble_spacing : float, default: 0
Minimal spacing between bubbles after collapsing.
Notes
-----
If "area" is sorted, the results might look weird.
"""
area = np.asarray(area)
r = np.sqrt(area / np.pi)
self.bubble_spacing = bubble_spacing
self.bubbles = np.ones((len(area), 4))
self.bubbles[:, 2] = r
self.bubbles[:, 3] = area
self.maxstep = 2 * self.bubbles[:, 2].max() + self.bubble_spacing
self.step_dist = self.maxstep / 2
# calculate initial grid layout for bubbles
length = np.ceil(np.sqrt(len(self.bubbles)))
grid = np.arange(length) * self.maxstep
gx, gy = np.meshgrid(grid, grid)
self.bubbles[:, 0] = gx.flatten()[:len(self.bubbles)]
self.bubbles[:, 1] = gy.flatten()[:len(self.bubbles)]
self.com = self.center_of_mass()
def center_of_mass(self):
return np.average(
self.bubbles[:, :2], axis=0, weights=self.bubbles[:, 3]
)
def center_distance(self, bubble, bubbles):
return np.hypot(bubble[0] - bubbles[:, 0],
bubble[1] - bubbles[:, 1])
def outline_distance(self, bubble, bubbles):
center_distance = self.center_distance(bubble, bubbles)
return center_distance - bubble[2] - \
bubbles[:, 2] - self.bubble_spacing
def check_collisions(self, bubble, bubbles):
distance = self.outline_distance(bubble, bubbles)
return len(distance[distance < 0])
def collides_with(self, bubble, bubbles):
distance = self.outline_distance(bubble, bubbles)
return np.argmin(distance, keepdims=True)
def collapse(self, n_iterations=50):
"""
Move bubbles to the center of mass.
Parameters
----------
n_iterations : int, default: 50
Number of moves to perform.
"""
for _i in range(n_iterations):
moves = 0
for i in range(len(self.bubbles)):
rest_bub = np.delete(self.bubbles, i, 0)
# try to move directly towards the center of mass
# direction vector from bubble to the center of mass
dir_vec = self.com - self.bubbles[i, :2]
# shorten direction vector to have length of 1
dir_vec = dir_vec / np.sqrt(dir_vec.dot(dir_vec))
# calculate new bubble position
new_point = self.bubbles[i, :2] + dir_vec * self.step_dist
new_bubble = np.append(new_point, self.bubbles[i, 2:4])
# check whether new bubble collides with other bubbles
if not self.check_collisions(new_bubble, rest_bub):
self.bubbles[i, :] = new_bubble
self.com = self.center_of_mass()
moves += 1
else:
# try to move around a bubble that you collide with
# find colliding bubble
for colliding in self.collides_with(new_bubble, rest_bub):
# calculate direction vector
dir_vec = rest_bub[colliding, :2] - self.bubbles[i, :2]
dir_vec = dir_vec / np.sqrt(dir_vec.dot(dir_vec))
# calculate orthogonal vector
orth = np.array([dir_vec[1], -dir_vec[0]])
# test which direction to go
new_point1 = (self.bubbles[i, :2] + orth *
self.step_dist)
new_point2 = (self.bubbles[i, :2] - orth *
self.step_dist)
dist1 = self.center_distance(
self.com, np.array([new_point1]))
dist2 = self.center_distance(
self.com, np.array([new_point2]))
new_point = new_point1 if dist1 < dist2 else new_point2
new_bubble = np.append(new_point, self.bubbles[i, 2:4])
if not self.check_collisions(new_bubble, rest_bub):
self.bubbles[i, :] = new_bubble
self.com = self.center_of_mass()
if moves / len(self.bubbles) < 0.1:
self.step_dist = self.step_dist / 2
def plot(self, ax, labels, colors):
"""
Draw the bubble plot.
Parameters
----------
ax : matplotlib.axes.Axes
labels : list
Labels of the bubbles.
colors : list
Colors of the bubbles.
"""
for i in range(len(self.bubbles)):
circ = plt.Circle(
self.bubbles[i, :2], self.bubbles[i, 2], color=colors[i])
ax.add_patch(circ)
ax.text(*self.bubbles[i, :2], labels[i],
horizontalalignment='center', verticalalignment='center')
bubble_chart = BubbleChart(area=browser_market_share['market_share'],
bubble_spacing=0.1)
bubble_chart.collapse()
fig, ax = plt.subplots(subplot_kw=dict(aspect="equal"))
bubble_chart.plot(
ax, browser_market_share['browsers'], browser_market_share['color'])
ax.axis("off")
ax.relim()
ax.autoscale_view()
ax.set_title('Browser market share')
plt.show()